Scratch Magnetic Apogee Detection Sensor
Scratch - Magnetic Apogee Detection Sensor {Scratch}
Contributed by Robert Galejs
| Manufacturer: | Scratch |
Introduction:
Nearly everyone is familiar with the horizontal component of the Earth’s magnetic field. It is this component that allows compasses to point north. Over most of the Earth, this horizontal field is only a small component of the total field. Figure 1 shows a simplified representation of the Earth’s dipole field, it resembles the field due to a bar magnet. The field lines originate at the south magnetic pole and terminate at the north magnetic pole. The angle that this field makes when it intersects the Earth’s surface is known as the inclination angle. Figure 2 shows a contour plot of the inclination angle over the continental US. This angle varies from about 60 degrees in the south to about 75 degrees in the north. Since the magnetic field has a large vertical component, it is possible to use it as a reference to sense a rocket’s orientation and to set off an ejection charge when the rocket tips over at apogee.
Figure 1. Idealized view of the Earth’s magnetic field.
Figure 2. Contour plot of the magnetic inclination angle across the United States
A common misconception is that a mercury switch could be used to detect this orientation more easily. A mercury switch uses the Earth’s gravity as a reference and senses “down” with the blob of mercury. Acceleration due to gravity with the rocket sitting on the launch pad and accelerations while in flight are indistinguishable with the mercury switch. Once the rocket launches, it no longer has the Earth’s gravity as a reference and it will respond to any acceleration or deceleration. After the motor burns out, the rocket will begin to decelerate due to air resistance but the mercury in the switch will keep on moving. This is the same behavior that turning the switch over while standing on the ground would have. In effect, this switch will believe it is upside down and will trigger an ejection charge immediately after motor burnout, not a desirable situation. The Earth’s magnetic field is independent of the rocket’s speed or acceleration.
In order to use the magnetic field as a reference, a sensor is desired that will output a voltage proportional to the angle of the sensor relative to the field, V=Vmax cos q. When this voltage falls below a given reference, the ejection charge could be triggered. To see how such a magnetic apogee sensor would function, consider Figure 3, which shows the relationship between the magnetic field and a rocket, as seen looking towards the west. The magnetic field in this example makes an angle of 70 degrees with respect to horizontal pointing down towards the north, a typical situation in the northern US. The rocket makes an angle of q with respect to the magnetic field. The magnetic apogee sensor is adjusted to trigger ejection when the field drops to zero (the dashed line in the figure). This results in then the ejection charge going off at an angle dependent on the rockets flight direction. To the south (to the left in Fig 3), ejection will occur when the rocket is pointed 20 degrees below horizontal, to the north (to the right in Fig 3), 20 degrees above horizontal and to the east or west, close to horizontal.
Figure 3. View to the west of a rocket in the Earth’s magnetic field Sensor Design
Several solid state sensors exist which can be used to detect magnetic fields. The two most common are based on the Hall effect or magnetoresistance. Most Hall effect sensors do not have the sensitivity to detect the 0.5 gauss field of the Earth, however the magnetoresistance (MR) sensors do. Two examples of these MR sensors are the Honeywell HMC1001 and the Philips KMZ51. Data sheets for these devices are available online at: Honeywell and Philips. These two devices are both MR Wheatstone bridges which output a voltage proportional to the magnetic field along the sensitive axis of the sensor. The output voltages are typically 5-15 mV/gauss.
The output from one of these sensors must be offset and amplified to place the output into a useful voltage range. A schematic for my prototype magnetic apogee detection sensor is shown in Figure 4. It is based on the HMC1001 with its output offset (resistors R2 or R3) and amplified (opamps A, B and C) to give 0.5 V when pointing directly down along the magnetic field and 4.0 V when pointing upwards. Capacitors C3 and C4 filter out high frequency noise. This voltage is fed to a comparator (opamp D) with a 2.5 V reference. The comparator goes high when the sensor is approximately perpendicular to the magnetic field, as was discussed earlier. The comparator output drives a HEXFET that discharges a capacitor (C2) through a flashbulb which ignites a blackpowder ejection charge. This prototype is about 1” by about 4” but the components are quite small and could easily be fit on a printed circuit board which will fit in a BT-5. A sensor based on the KMZ51 would be very similar in design but with different offset (R2 or R3) and gain (R5, R8 and R10) resistors. All of the parts, aside from the magnetic sensor, are readily available at Radio Shack.
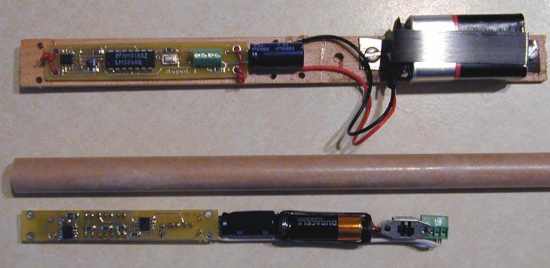
 A photograph of my prototype sensor is shown below. The HMC1001 is at the lower left corner of the board. Above it are the switch and capacitor used to reset the sensor. The LM324 quad op-amp and resistors are hidden under the ribbon cable and HEXFET. At the far right of the board is the 7805 voltage regulator. Off to the right of the board are the large capacitor and 9V lithium battery.
A photograph of my prototype sensor is shown below. The HMC1001 is at the lower left corner of the board. Above it are the switch and capacitor used to reset the sensor. The LM324 quad op-amp and resistors are hidden under the ribbon cable and HEXFET. At the far right of the board is the 7805 voltage regulator. Off to the right of the board are the large capacitor and 9V lithium battery.
Figure 4. Schematic diagram of prototype magnetic apogee detection sensor
Scott Aleckson has created a highly simplified magnetic apogee detector circuit <click here>
Figure 4a. Simplified schematic diagram
One peculiarity of the magneto-resistive sensors is their hysteresis when exposed to large magnetic fields. These devices rely on the orientation of magnetic domains within thin films of a Ni-Fe alloy. When they are exposed to large fields (a few hundred gauss or so) they “remember” that exposure which throws off their sensitivity and offset. These films can be reset by a short duration exposure to a large magnetic field in the correct direction. MR devices have built in set/reset terminals, which make it very easy to reset these films with a very short pulse of current without the use of external coils. This typically takes 1-3 amps for 2-3 microseconds which can be realized through the discharge of a small capacitor. The switch in Figure 4 discharges a capacitor (C1) through the device to reset it.
This magnetic apogee detection sensor has several benefits. It is an adaptive device which senses the environment, much like accelerometers and altimeters but does not assume a vertical flight and is not sensitive to shockwaves from supersonic flights. For rocket flights with far from nominal trajectories such as unstable flights, CATOs or failed ignition of upper stages, this sensor would deploy the parachute as soon as the rocket tips over. It is a small, lightweight, and inexpensive sensor that can be easily flown in model rockets. The circuit is entirely analog, with no digital components to program.
This new sensor does have a few potential drawbacks. The ejection angle does depend on E/W/N/S flight path so that it’s behavior will vary from launch to launch with a bigger variation the further south one is launching. This is due to the smaller inclination angle in these regions. It has the potential to be affected by stray magnetic fields from ferrous components in the launcher, airframe or avionics as well as the high currents in launch system. However, so far I have not seen any indications that this is a problem. This sensor only triggers the ejection and does not record any data such as one might get from an altimeter or accelerometer. Also, being sensitive to rocket orientation, it will trigger ejection if the rocket tips over on the pad.
Flight Results
I have test flown this sensor at CATO, CMASS and Frontier Rocketry sport launches. My test vehicle is an Estes Loadstar flying on a C6. This is a nice rocket for this purpose since the electronics are visible in the clear payload bay, which is a good conversation starter. Before it’s maiden launch at CATO XII, I heard many skeptical comments from the crowd. It was somewhat windy that day and the Loadstar weather-cocked significantly into the wind toward the south. This delayed the ejection somewhat since in this direction the rocket must angle downwards about 20 degrees to trigger ejection, which is exactly what happened. At the CMASS launch it was another windy day and this time the rocket headed to the northwest and ejected overhead so I’m not sure of the angle, but it was certainly close to apogee. For these first two flights, I used a C6-7 to provide motor ejection backup in case the sensor failed to function as desired. This would have provided a low but still above ground ejection. With increased confidence from these successes and to make a more dramatic demonstration, my next flight was on a C6-0 so the magnetic deployment was the only recovery system. At the Frontier launch, it was nice and calm. Here the rocket ended up heading slightly west with ejection essentially right at apogee.
Summary
The Earth’s magnetic field may be used as a reference for the model rocket recovery deployment. A flight tested magnetic apogee detection sensor is described, complete with a schematic diagram. This design is simple, inexpensive and appears to work reliably. This new device senses the rocket’s orientation with respect to the Earth’s field and triggers ejection when the rocket noses over near apogee. I am very happy with its performance and I am currently building a PML Pterodactyl Jr with magnetic deployment for some high power demonstration flights. Will others be as enthusiastic about this new sensor as I am? I certainly hope so, but only time will tell. A postscript version of this article.
 |
 |